CTなど画像データから作った立体は、撮影時に設定した位置データに従うので、
並べるととんでもなく離れていることがあります。
ここでは、Pythonを使って2つの離れた表面データの位置をあわせる方法を紹介します。
このページで示す事
計算式
表面Pの3点\(p_1,p_2,p_3\)と表面Qの3点\(q_1, q_2, q_3\)を合わせるためには
回転行列 \(M = M_q \cdot Mp ^{\mathrm{T}}\)
移動行列 \(t = – M_q \cdot M_p ^{\mathrm{T}} \cdot p_1 + q_1\)
※ \(M_p, M_q\)はそれぞれ絶対座標から表面P、Qへの回転行列
4 × 4行列で書くと
\(
\left(
\begin{array}{ccc|c}
& & &\\
& \huge{M} & & \huge{t}\\
& & & \\
\hline
& \large{0} & & \large{1}
\end{array}
\right)
\)
となる。
スクリプト
python, numpy, numpy-stlを使用して表記
1.3点を使って表面を合わせるということ
この時、基準の点をとって位置を合わせてやる事ができます。
立体の点を決めるのは3点になります。
いろいろな合わせ方がありますが、ここでは座標軸を合わせる方法を行います。
「座標軸をあわせる」というと難しいですが
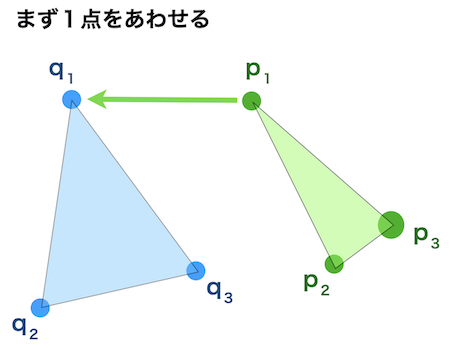
1点をあわせる
↓
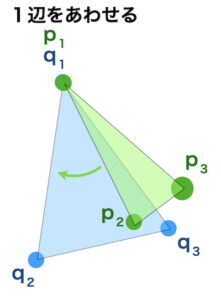
2点の直線をあわせる
↓
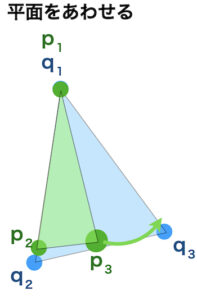
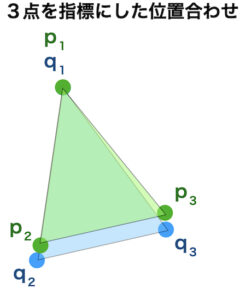
3点の面をあわせる
ことで全体を一致させます。
2.ベクトルを使った計算方法
まず2つの表面で3点をとります。
合わせに行く表面データPの点の名前を\(p_1, p_2, p_3\)とします
基準面の表面データQの点を\(q_1, q_2, q_3\)とします。
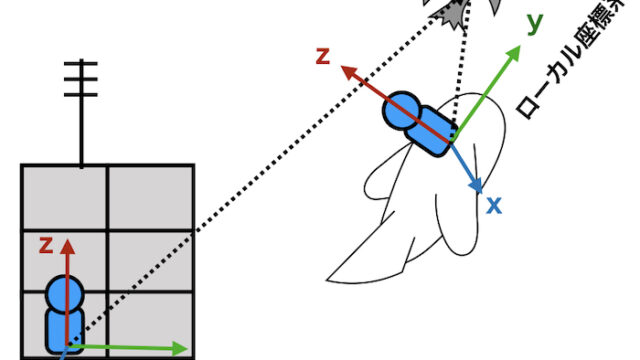
表面データPで座標を設定します。
座標の決め方はPとQについて同じなので、
表面データPについて説明します。
\(p_1\) ⇒ \(p_2\)のベクトルを \(\overrightarrow{px} \)
\(p_1\) ⇒ \(p_3\)のベクトルを \(\overrightarrow{py} \)
とします。
\(p_1\) を原点
\(\overrightarrow{px} \)方向をx軸
\(\overrightarrow{px} \)と\(\overrightarrow{py} \)とに垂直な軸がz軸
z軸とx軸に垂直な軸がy軸
とします。
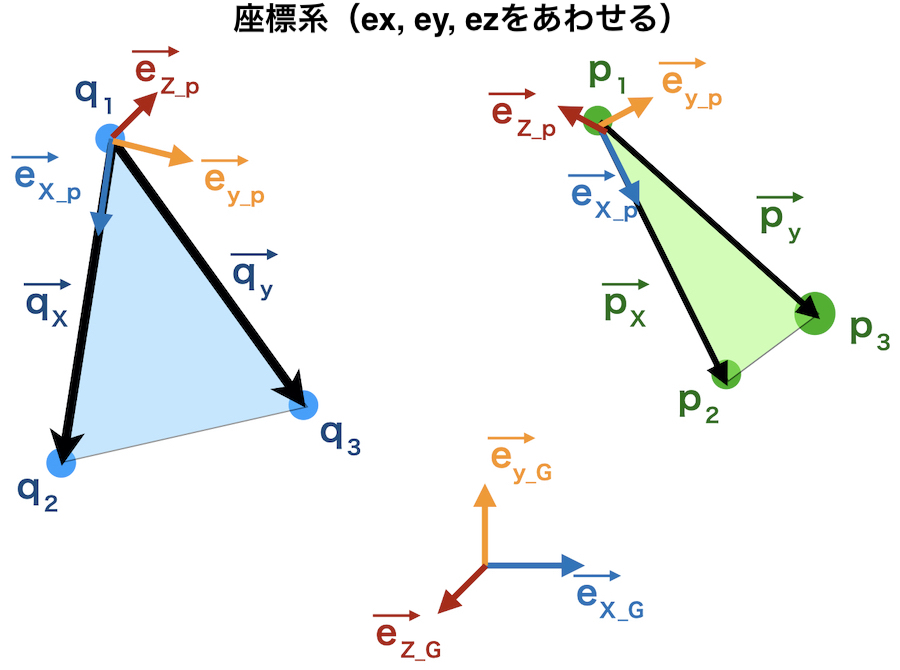
これら表面データP, Qと絶対座標系の単位ベクトルをあわせることで、3点の移動行列を求めます。
x軸の単位ベクトル\(\overrightarrow{ex_p} \)は
\(\displaystyle \overrightarrow{ex_p} = \frac{\overrightarrow{px}}{|\overrightarrow{px} |}\)
\(\overrightarrow{px}\)と\(\overrightarrow{py}\)に垂直なベクトルは2つの外積になるので、
z軸の単位ベクトルは
\(\displaystyle \overrightarrow{ez_p} = \frac{\overrightarrow{px} \times \overrightarrow{py}}{|\overrightarrow{px} \times \overrightarrow{py}|}\)
y軸の単位ベクトルは
\(\displaystyle \overrightarrow{ey_p} = \overrightarrow{ez_p} \times \overrightarrow{ex_p}\)
です。
ここで外積を逆にしてしまって、
\(\displaystyle \overrightarrow{ey_p} = \overrightarrow{ex_p} \times \overrightarrow{ez_p}\)
としてしまうと座標系にならないことに注意が必要です。
ここでex, ey, ezを縦に書いた行列
\(M_p = \begin{pmatrix}
\overrightarrow{ex_p} & \overrightarrow{ey_p} & \overrightarrow{ey_p}
\end{pmatrix}\)
は回転行列です。
ちなみにここで
単位ベクトルはx, y, zの値があるため、
\(\overrightarrow{ex_p} =
\left(
\begin{array}{c}
ex_{p1} \\
ex_{p2} \\
ex_{p3}
\end{array}
\right)
\) \(\overrightarrow{ey_p} =
\left(
\begin{array}{c}
ey_{p1} \\
ey_{p2} \\
ey_{p3}
\end{array}
\right)
\) \(\overrightarrow{ez_p} =
\left(
\begin{array}{c}
ez_{p1} \\
ez_{p2} \\
ez_{p3}
\end{array}
\right)
\)
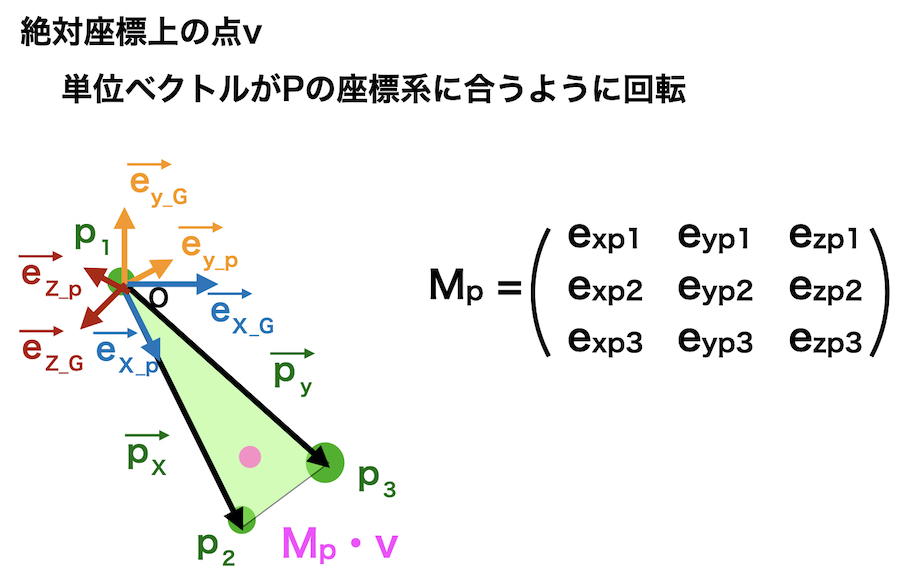
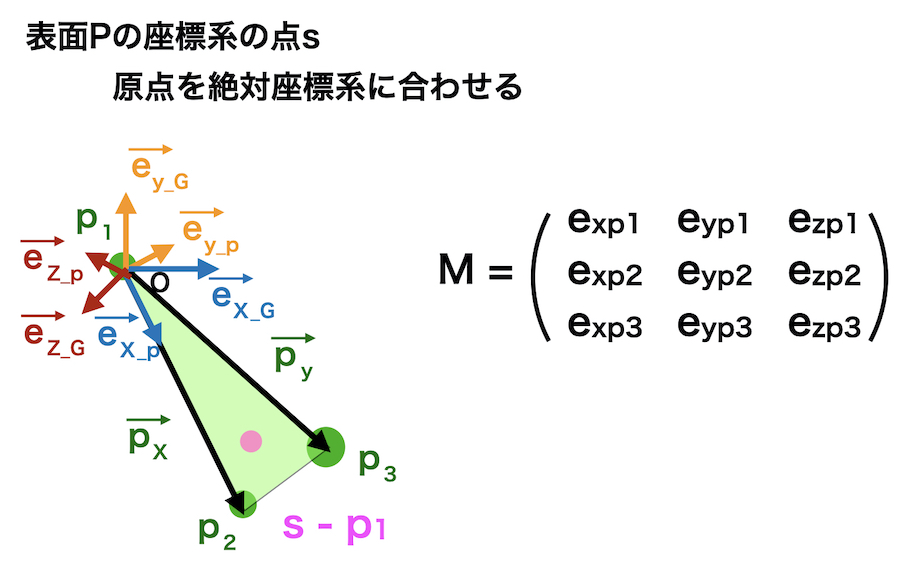
\(M_p = \begin{pmatrix}
ex_{p1} & ey_{p1} & ez_{p1} \\
ex_{p2} & ey_{p2} & ez_{p2} \\
ex_{p3} & ey_{p3} & ez_{p3}
\end{pmatrix}\)
と書けます。
3.表面データ上の点で考える
わかりやすいように、表面データP上の点を表面データQ上に合わせる流れで説明します。
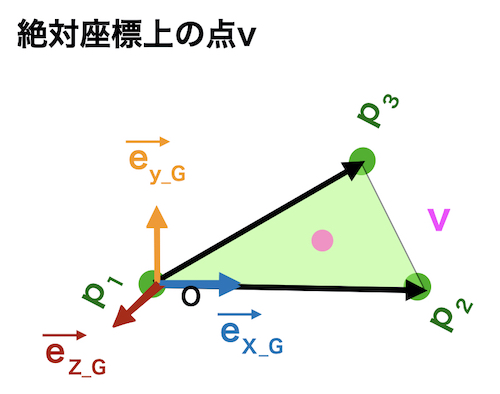
絶対座標上の点\(v\)
を表面データP上の同じ座標位置に持っていくには
まずベクトルを回転させます。
そして原点がPの原点\(p_1\)に合うように移動させます
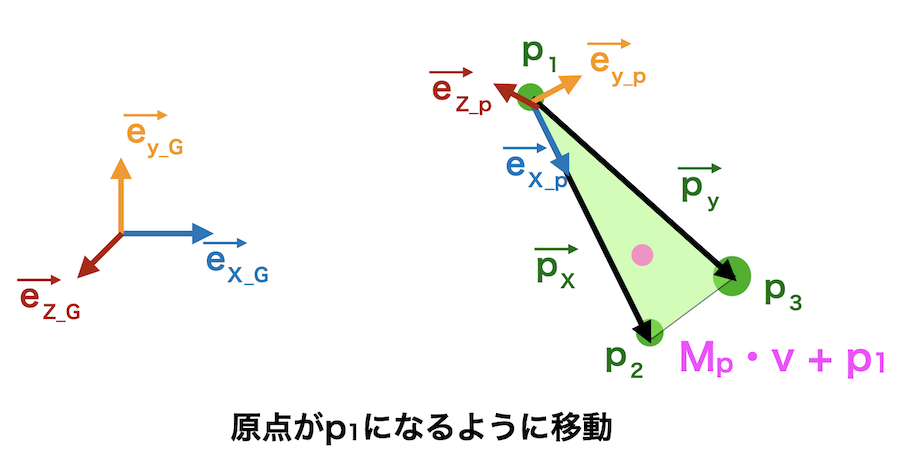
\(M_p \cdot v + p_1\)
逆に表面データP上の点 s を絶対座標に移動させるには
まず原点を絶対座標系に合わせるように移動させます。
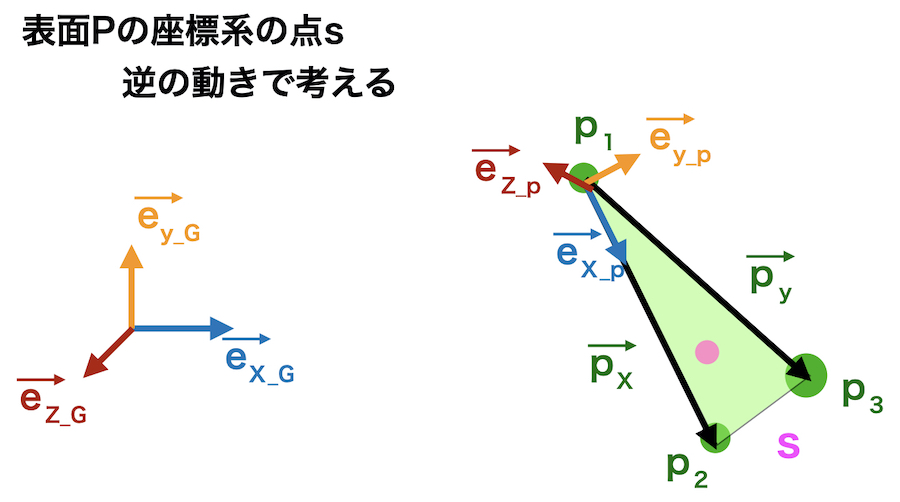
次に先程とは逆の回転行列で回転させます。
回転行列の逆行列は転置行列なので、ここでは転移行列をかけます。
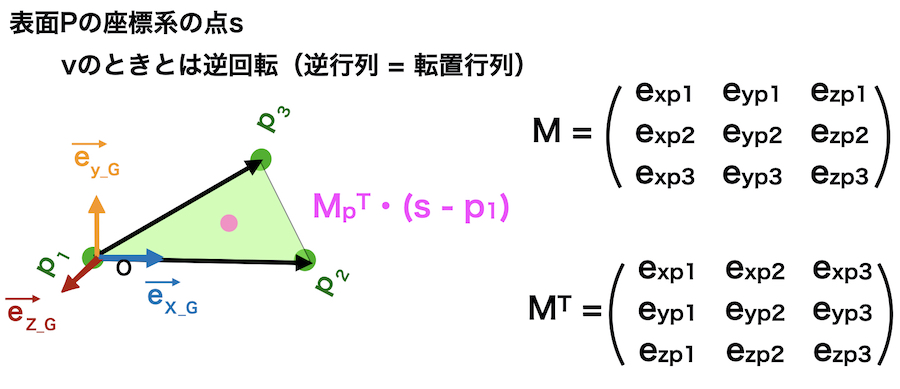
\(M_p ^{\mathrm{T}} \cdot (s – p_1)\)
一方で絶対座標上点 u を一致する表面データQ上に移動させるには
\(M_q \cdot u + q_1\)
ですから、まとめると
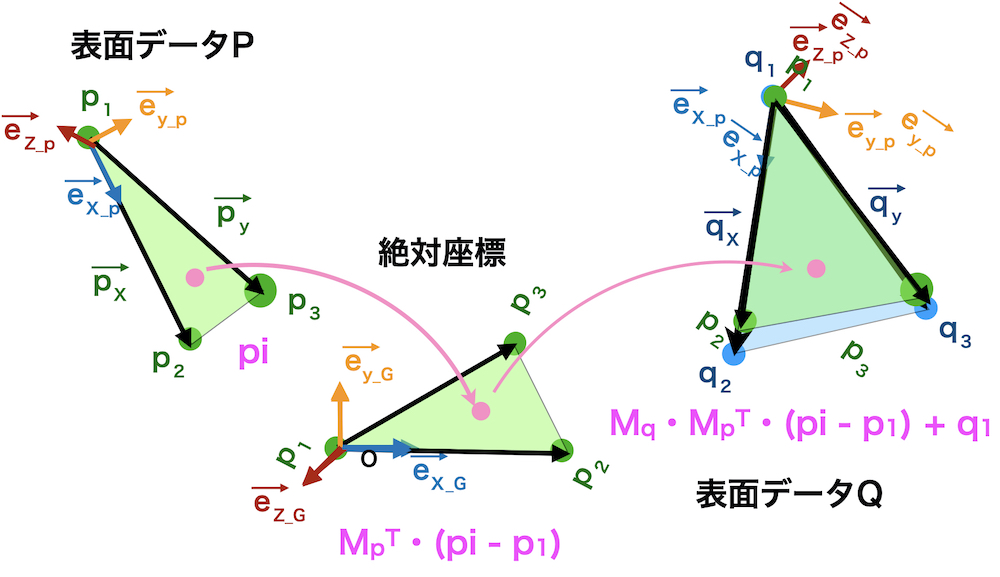
表面データP上の点piを表面データQ上に移動させるには
\(M_q \cdot (M_p ^{\mathrm{T}} \cdot (pi – p_1)) + q_1\)
\(M_q \cdot Mp ^{\mathrm{T}} \cdot pi – M_q \cdot M_p ^{\mathrm{T}} \cdot p_1 + q_1\)
となります。
これを座標でかくと
これは回転の成分 と
\(M = M_q \cdot Mp ^{\mathrm{T}}\)
移動の成分
\(t = – M_q \cdot M_p ^{\mathrm{T}} \cdot p_1 + q_1\)
とすると
\(M \cdot p_i + t\)
となっています。
4.Pythonのコードで書く
この流れを書くと
import numpy as np
def transform_matrix(p1, p2, p3, q1, q2, q3):
"""
入力パラメータ: P上の点p1, p2, p3の座標、Q上のq1, q2, q3の座標
出力パラメータ: 回転行列 M, 移動行列t
"""
#表面Pについてパラメータを計算
#px, pyのベクトルを計算する
px = p2 - p1
py = p3 - p1
#単位ベクトルex, ey, ezで計算する
ex_p = px / np.linalg.norm(px)
ez_p = np.cross(px, py) / np.linalg.norm(np.cross(px, py))
ey_p = np.cross(ez_p, ex_p)
#縦の単位ベクトルを横に並べたベクトルが回転行列
Mp = np.array([ex_p, ey_p, ez_p]).T
#同様に表面Qについても計算
qx = q2 - q1
qy = q3 - q1
ex_q = qx / np.linalg.norm(qx)
ez_q = np.cross(qx, qy) / np.linalg.norm(np.cross(qx, qy))
ey_q = np.cross(ez_q, ex_q)
Mq = np.array([ex_q, ey_q, ez_q]).T
#ベクトルの式より、表面P⇒Qに移動する回転行列、移動行列を計算
M = np.dot(Mq, Mp.T)
t = - np.dot(np.dot(Mq, Mp.T), p1) + q1
return M, t
となります。
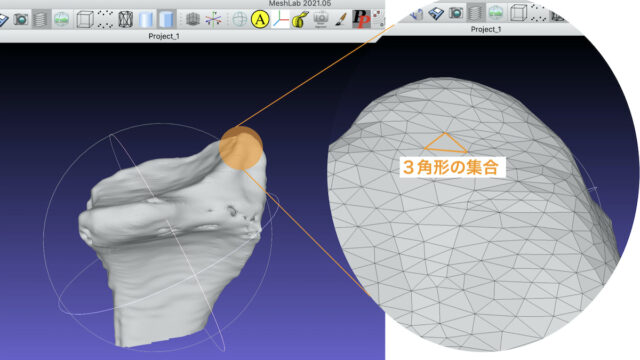
5.CTデータで検証 (numpy-stlを使用)
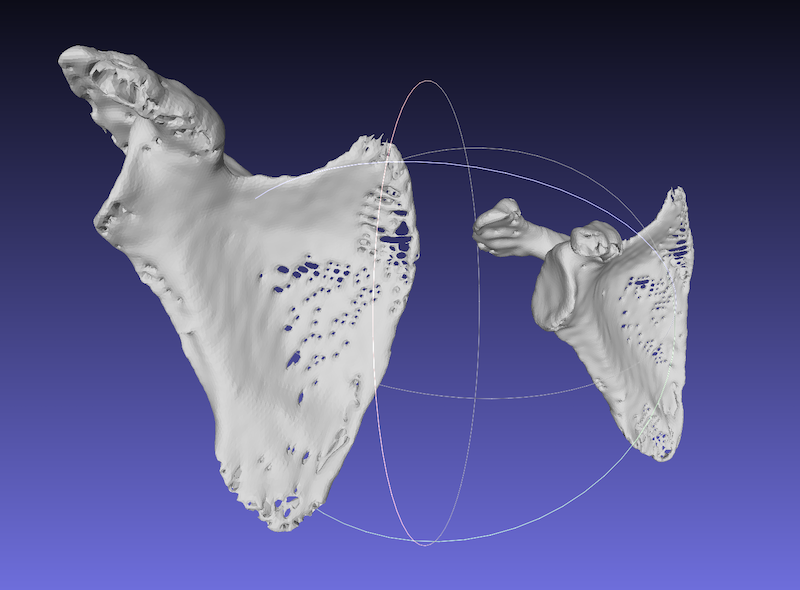
例として、肩甲骨の骨のstlデータを使用します。
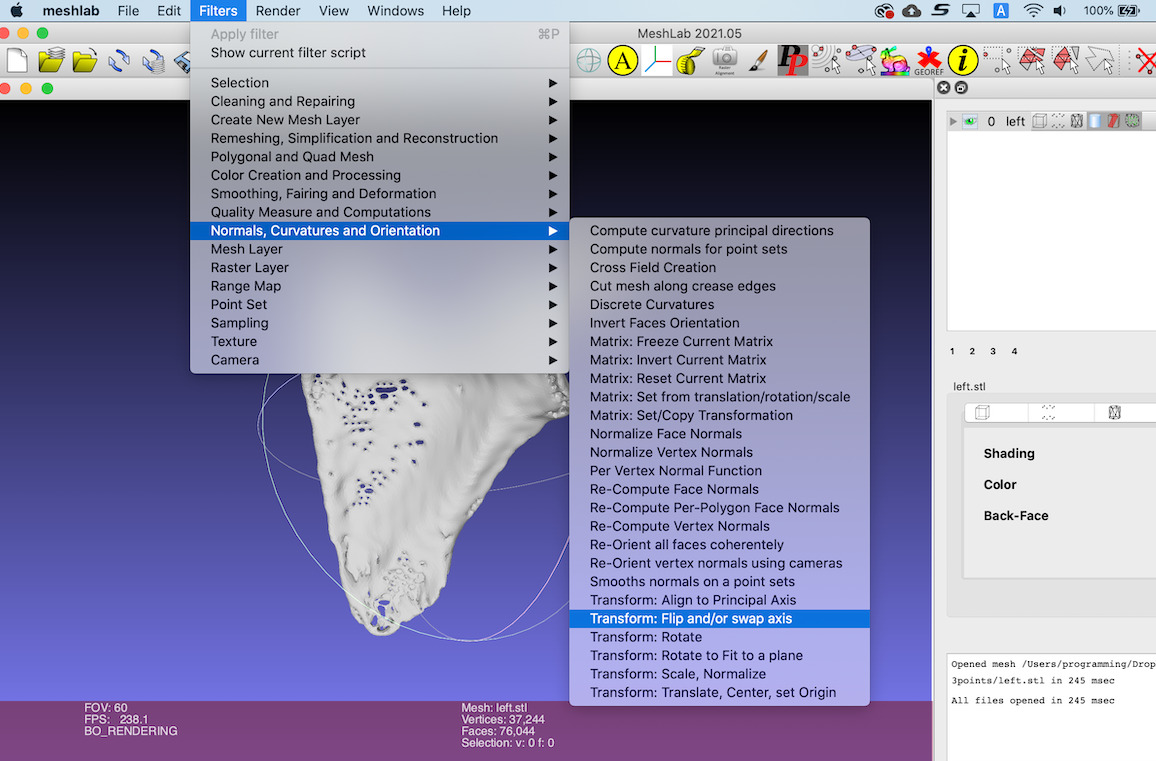
左と右では左右対称なので左をひっくり返します。
MeshLabの「Filters」→ 「Normals, Curvatures and Orientation」→「Flip and/or swap axis」
を使ってひっくり返します。
右と左(反転)の肩甲骨です。 位置がずれています。
右で点を3つとり、right.ppファイルで保存します。
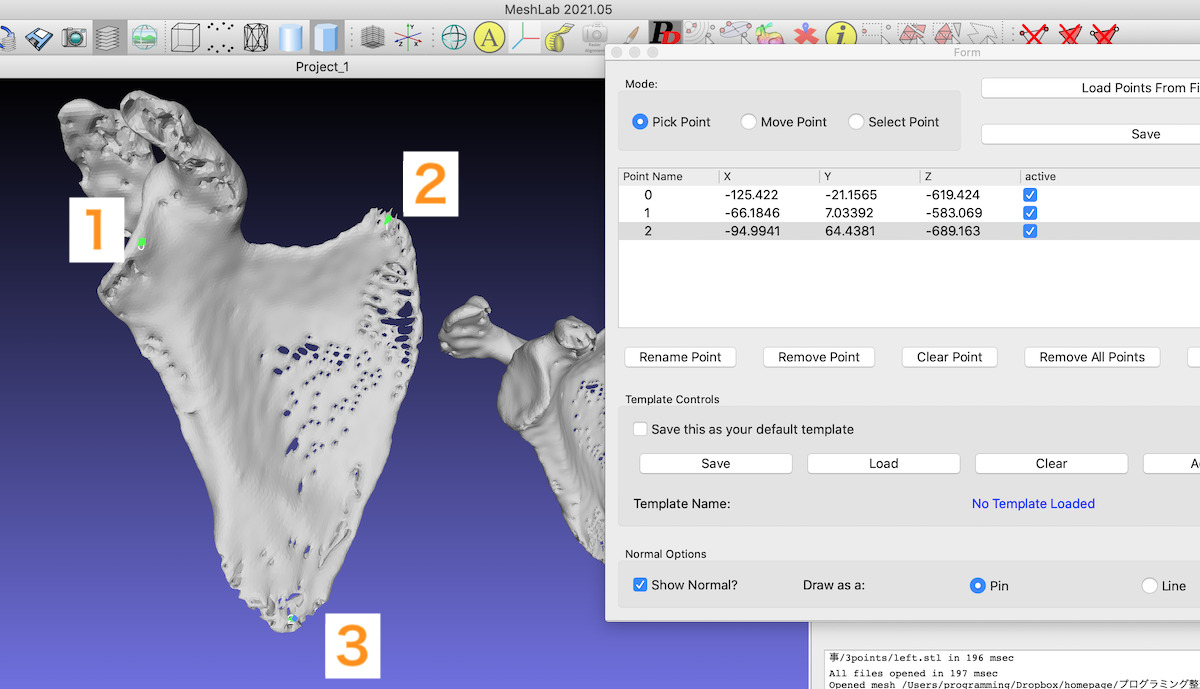
左でも点を3つとり、left.ppファイルで保存します。
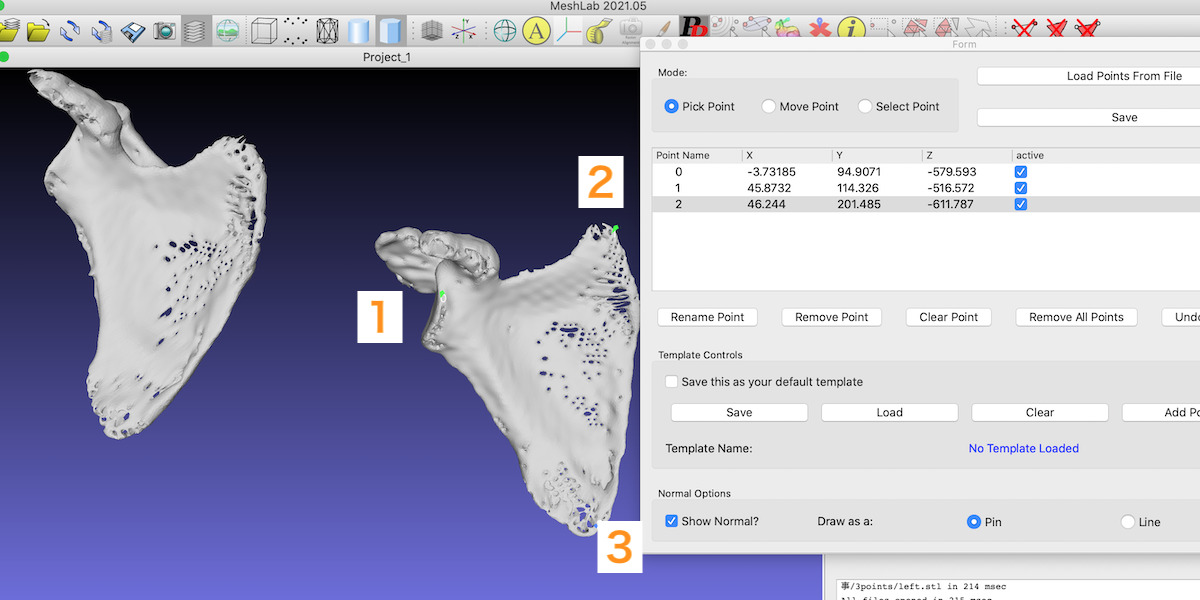
点をとる順番を一致させることが重要です。
これら表面データとポイント座標のファイル(.ppファイル)を作業フォルダにおいて以下のファイルを実行します。
import point_class
import rough_match
"""ppファイルから3点を読み取る"""
right_points = point_class.MeshlabPp('right.pp')
# right.stlの3点をright_pointsに入れる
left_points = point_class.MeshlabPp('left.pp')
# left.stlの3点をleft_pointsに入れる
p1, p2, p3 = right_points.point_list
q1, q2, q3 = left_points.point_list
M, t = rough_match.transform_matrix(p1, p2, p3, q1, q2, q3)
#2つの表面からの3点ずつを入力し、回転行列と移動行列を計算する
print(M)
#回転行列
# [[ 0.9590293 -0.05833918 -0.27723519]
# [-0.01219987 0.96915644 -0.24614419]
# [ 0.28304412 0.23944172 0.92873769]]
print(t)
# 移動行列
# [-56.40921238 -38.58660633 36.25468863]
※.ppファイルからの点の抽出は以下で述べています
⇒ MeshLabで点をとってデータを抽出する方法
位置合わせの結果は外部パッケージのnumpy-stlをインストールすることで視覚的に確認できます。
numpy-stlの使用には
pip install numpy-stl
でインストールする必要があります。
right.stlを回転行列\(M\), 移動行列\(t\)で移動します。
import numpy as np
from stl import mesh
right_stl = mesh.Mesh.from_file('right.stl')
transform_matrix = np.identity(4)
transform_matrix[:3, :3] = M
transform_matrix[:3, 3] = t
print(transform_matrix)
# [[ 9.59029296e-01 -5.83391829e-02 -2.77235188e-01 -5.64092124e+01]
# [-1.21998734e-02 9.69156438e-01 -2.46144190e-01 -3.85866063e+01]
# [ 2.83044118e-01 2.39441723e-01 9.28737685e-01 3.62546886e+01]
# [ 0.00000000e+00 0.00000000e+00 0.00000000e+00 1.00000000e+00]]
right_stl.transform(transform_matrix)
right_stl.save('right_trans.stl')
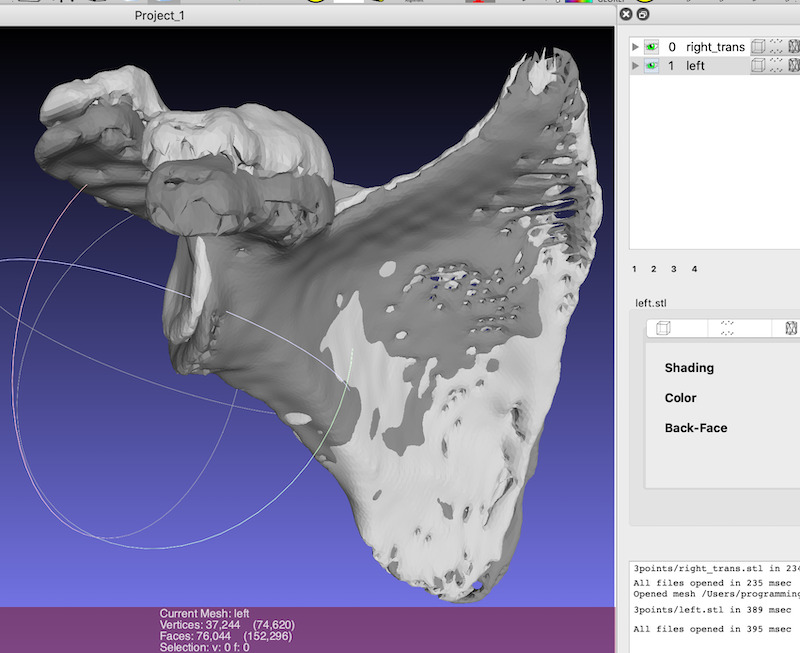
3点をもとにした移動でもかなり一致する事がわかります。
また説明していくね。
補足:Meshlabでの点の読み取り
Meshlabで点を読む方法は
「Meshlabで表面上の点を読み取る」
「ソフトウェアで書き出したファイルの読み取り」
で説明しています。
ここでは以下の書き出した.ppファイルの読み取りにpoint_class.pyを使用しています。
<!DOCTYPE PickedPoints>
<PickedPoints>
<DocumentData>
<DateTime date=”2021-09-20″ time=”06:50:29″/>
<User name=”programming”/>
<DataFileName name=”right.stl”/>
<templateName name=””/>
</DocumentData>
<point x=”-125.42151″ active=”1″ name=”0″ y=”-21.156488″ z=”-619.42358″/>
<point x=”-66.18457″ active=”1″ name=”1″ y=”7.0339193″ z=”-583.06927″/>
<point x=”-94.994087″ active=”1″ name=”2″ y=”64.438072″ z=”-689.16339″/>
</PickedPoints>
<!DOCTYPE PickedPoints>
<PickedPoints>
<DocumentData>
<DateTime date=”2021-09-20″ time=”06:52:11″/>
<User name=”programming”/>
<DataFileName name=”left.stl”/>
<templateName name=””/>
</DocumentData>
<point y=”94.907089″ x=”-3.7318501″ active=”1″ z=”-579.5929″ name=”0″/>
<point y=”114.32571″ x=”45.873207″ active=”1″ z=”-516.57227″ name=”1″/>
<point y=”201.48509″ x=”46.244011″ active=”1″ z=”-611.78662″ name=”2″/>
</PickedPoints>
import numpy as np
class MeshlabPp(object):
"""
ppファイルをobjectに入れて読みこむ
.point_listで読み込んだポイントの座標をリストにして返す
"""
def __init__(self, file_name):
self.point_list = read_pp(file_name)
def read_pp(file_name):
point_list = []
with open(file_name) as f:
line = f.readline()
while line:
inside_line = line[line.find('<') + 1: line.find('/>')]
words = inside_line.split(' ')
if words[0] == 'point':
for word in words:
if 'x=' in word:
x = float(word.split('"')[1])
elif 'y=' in word:
y = float(word.split('"')[1])
elif 'z=' in word:
z = float(word.split('"')[1])
point_list.append(np.array([x, y, z]))
line = f.readline()
return point_list